LIGHT & SHADOW
by Tairan hao

Project Brief: This work demonstrates the ability of the most basic AI - based on time and time of learning and database analysis, trying to use artificial light and sound to predict some unknown possibility. The machine understands the information that is returned to the person's machine based on the behavior of the observer (information entered by the person).
Deep interpretation of the emergence of AL, AI can not change the natural laws of the human universe - everything is constantly changing, there is a certain degree of uncertainty. When this change of uncertainty is reflected in AL/AI, this change becomes gradually predictable, showing a vague and predictable prediction.
The high fidelity machine of this project should be displayed in a dark space with 4 sides of mirror, which can reflect the laser light into different angles and direction that creating various visual effect. For prototype, the main idea is to make the machine work and describe the concept. Therefore, demonstration videos are shot in the daylight environment.
Tool: Wekinator, TouchDesigner, Arduino, Kinect, Leap Motion, Processing
Duration: 12 weeks
Credits: Low Tech Art Lab(Technical support)
INTRODUCTION
According to the behavior of human input, the three laser lights produce a random visual effect (the machine remains stationary if there is no input in one space. This also gives a feeling of communication between humans and machines.

OUTPUT effect 1 (random)

OUTPUT effect 2 (random)

OUTPUT effect 3 (random)

MACHINE INTERACTION SYSTEM
STEP 1: Kinect Sensors read inputs from people
STEP 2: Wekinator receives input data(human skeleton) and starts to run algorithm in order to run the servos
STEP 3: TouchDesigner receive data from Wekinator and simulate the output data.

REVISED CULTURAL AI DESIGN TOOL

RULES AND DATASET
I build a database that collects differents motion of human. I also build an independent database that has different x,y,z position of the machine. The rules I created are trying to give a feeling that the machine is responding a similar move to the behavior of people.


CONSTRUCTION & MEASUREMENTS
Size: 40cm * 40cm * 40cm (can be changed according to hardware size or other requirements)

SIDE VIEW

TOP VIEW

ARM DETAILS

COMPONENTS
TECHNICAL KEY POINTS
Installed Motion Interactive System Design:
3 Robotic Arms; 6 joints total
Based on the position of people to determine the reaction of robotic arm, in the x, y, z coordinate of robotic arms in the physical space
extract the coordinate data of people’s motion and calculate, reflect on the physical machine
Challenging Parts:
Calculation, machine learning and algorithm through the simulation of people’s motion
Building the independent database of both machine’s motion and people’s motion
The data transmission between Kinect, TouchDesigner, Arduino and Wekinator
Future Iterations:
Finalize, enrich and expand the interactive system
The machine can imitate what the input does(human’s behavior) as a mirror
Adding more spreading medium in the space to create and emphasize the visual effect
PHYSICAL OBJECT

CLOSE UP

CLOSE UP

SIDE VIEW
PROCESS
IDEA GENERATION & SKETCHES
Cultural AI design tools help me to clarify my concept and how i want the machine to work. After dozens of iteration, i finalize my inputs and outputs, which are motions and laser light reflection in a space. The visualization of laser light displayed in a space can express the communication between human and machine.
After figure out what to do and how the machine operate, i started to draw sketches, material lists and made a detailed plan of the creating process. It includes what software do I use, what materials, 3D printing, laser cutting as well as calculating the measurements.
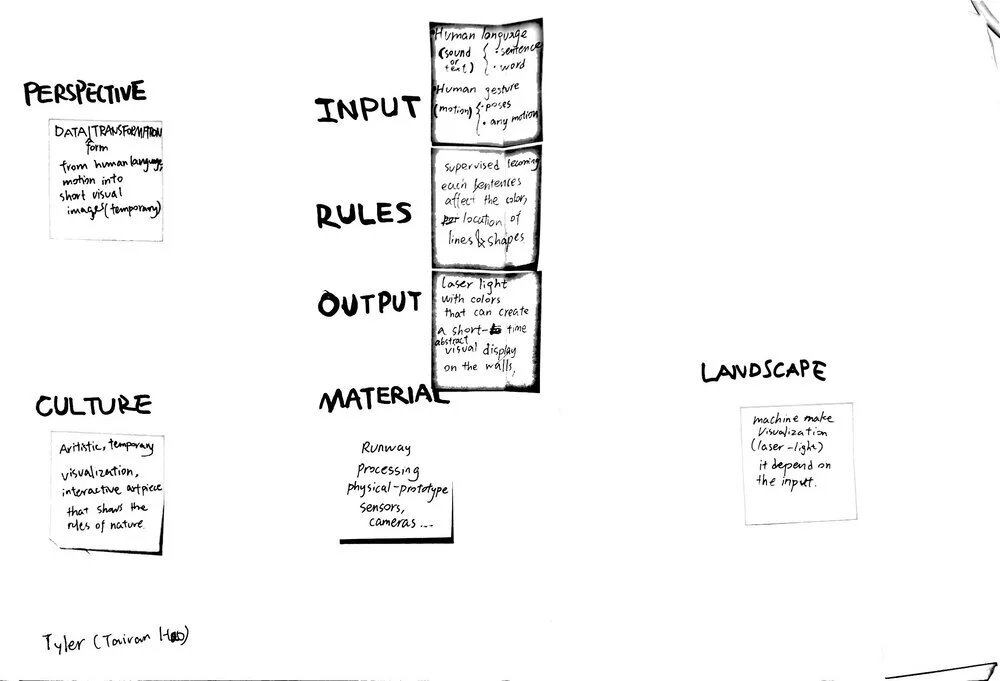
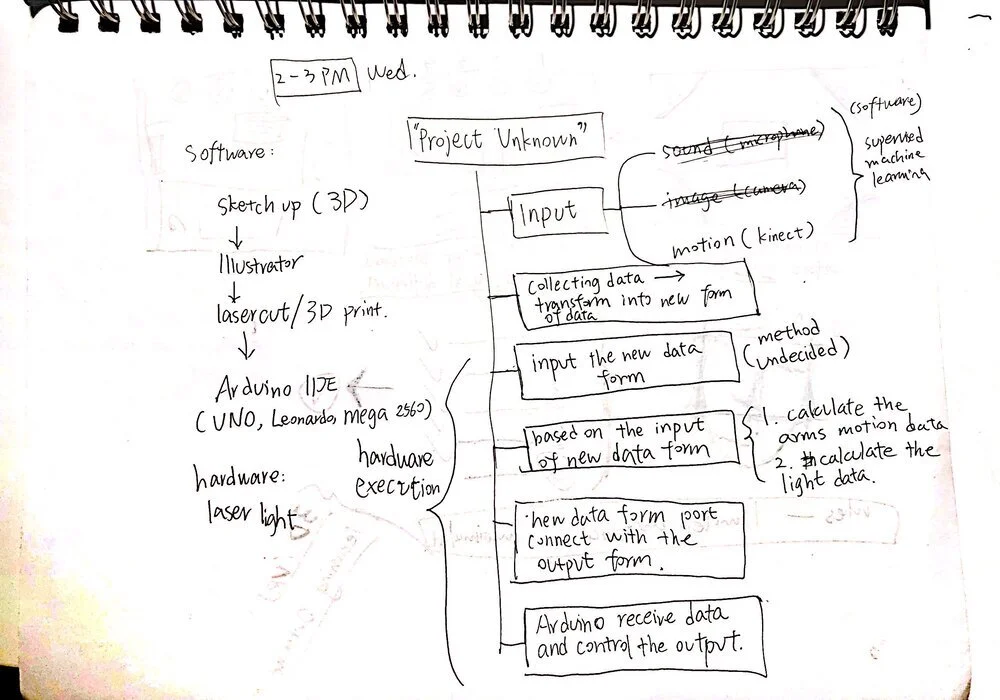
CULTURAL AI DESIGN TOOL SKETCHES
MATERIALS LIST
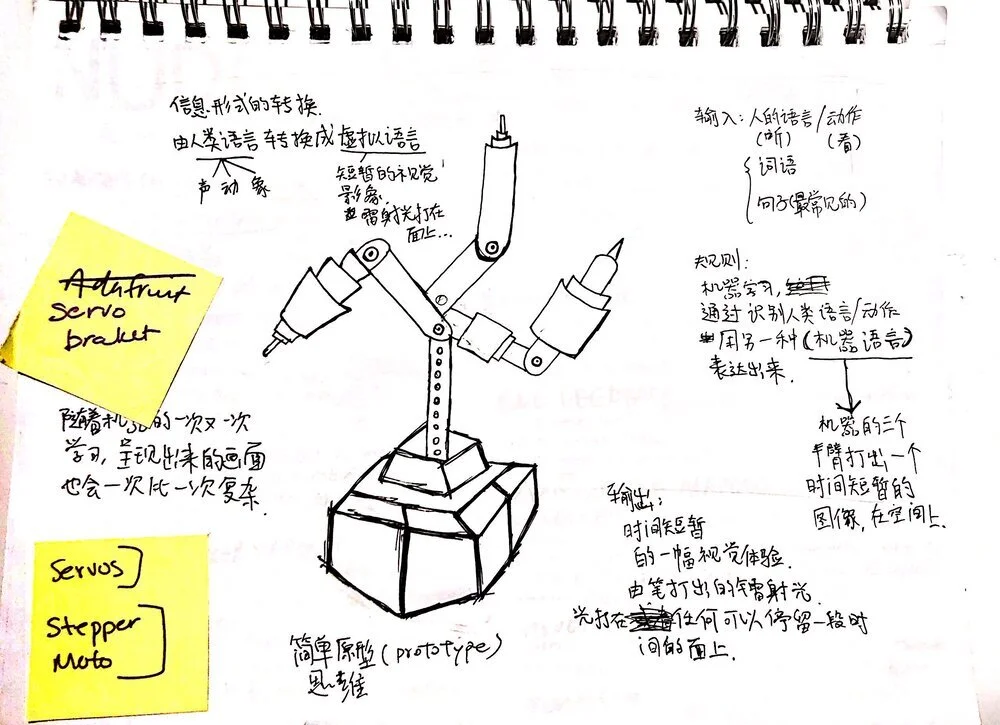
PHYSICAL OBJECT SKETCHES
RAPID PROTOTYPING
Included Materials:
Software: Arduino CC, Wekinator, Processing
Hardware: Arduino Uno, Leap Motion, Bread Board, Jumping Wires, Servos, Brackets
Processes and Challenges:
In the prototyping process, instead of using human motion as input, I chose to use leap motion as input since it is easier to build and control. The basic idea was to use finger gesture to control (affect) the servos running. The challenges i faced was to connect the Arduino and processing software in order to make the code react to the input responses.
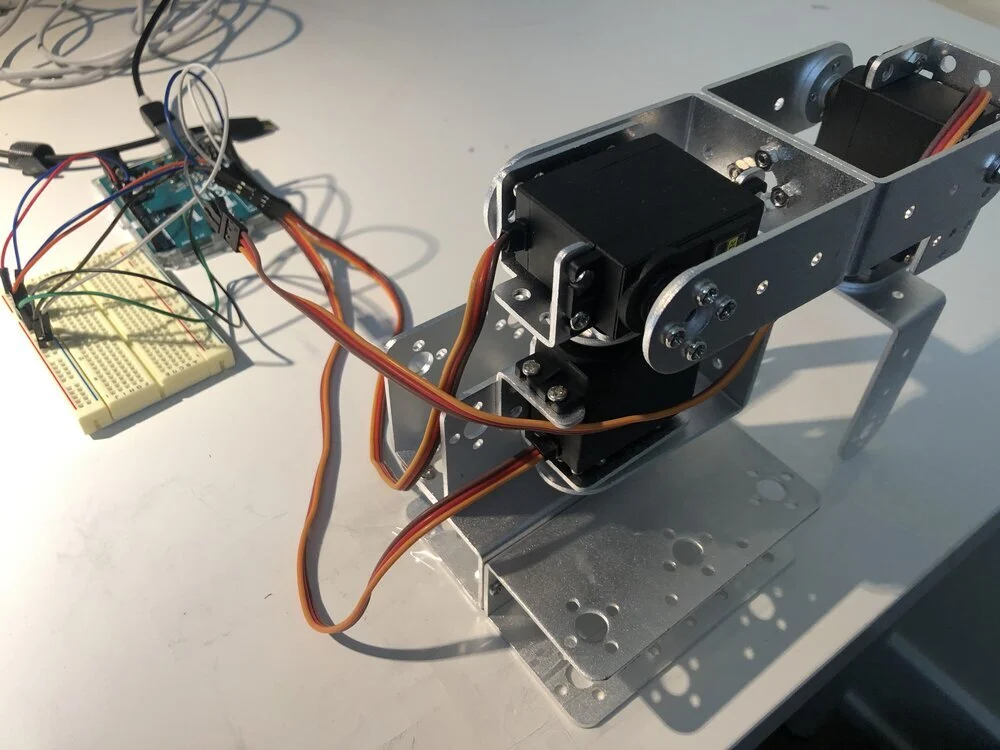
The First time made servos running, controlled by hand gestures

SIDE VIEW
The prototype connects with a laser light pen